
By Josué González García, Alfonso Gómez Espinosa; Tomás Salgado Jiménez; Luis Govinda García Valdovinos*
Autonomous underwater vehicles allow many high-risk tasks to be performed that are normally carried out by people. However, designing and building them is a challenge.
It’s estimated that over 90% of the underwater environment remains unexplored. The reason is quite simple: humans aren’t made to withstand extreme deep-sea conditions.
Nonetheless, there are activities that must be carried out in these environments, both for scientific and commercial reasons. Traditionally, inspection of ship hulls, structures, and pipelines has been done by professional divers.
Unmanned underwater vehicles have emerged as a quicker, less expensive, and safer alternative to carrying out these activities. They have also made it possible to explore deeper underwater environments for tasks such as mapping, oceanographic studies, and data collection, which has allowed us to expand our knowledge of the ocean and the seabed.
Autonomous underwater vehicles
In the early days, underwater robots were operated by someone on the surface, sending commands and receiving feedback via a physical connection known as an umbilical cord. As technology has developed, the ability of these robots to recognize what’s happening around them and to make decisions in response to this has increased, giving rise to autonomous underwater vehicles.

Up until now, the tasks performed by these vehicles have mostly included exploration, data collection, and surface or structural mapping.
In recent years, there has been enormous interest in developing this type of vehicle for inspection, maintenance, and repair tasks. In other words, the aim is for the robot to be able to interact with its surroundings and manipulate objects of interest.
Multi-robot systems
There are certain tasks that are too complex to be carried out by a single vehicle, which require collaboration by multiple units. This is how multi-robot systems came about.


Figure 2: (a) A collaborative exploration task. (b) A collaborative manipulation task.
Nowadays, you can find several examples of collaborative exploration and mapping operations carried out in real underwater environments. However, less progress has been made on collaborative manipulation tasks due to their complexity.
Designing autonomous underwater vehicles
Designing, constructing, and programming autonomous underwater vehicles is a huge challenge for both engineers and researchers [1]. In addition to the complexity of the task itself, the underwater environment poses many restrictions and complications that we do not come up against when designing and constructing land or airborne robots.
A perfect example of this is that the Global Positioning System (GPS) can only be used on the surface because the type of signals used by this system do not propagate underwater. Once underwater, robots must use other positioning methods, such as acoustic or inertial systems, which are slower and less reliable.

Autonomous navigation
Navigation is considered autonomous when a vehicle can move from an initial position to a final position without human intervention. This movement may occur in different ways [2]:
- Point-to-point navigation: the vehicle must move from one point to another, regardless of the route or the time it takes.
- Path tracking: the vehicle moves following a geometrically defined path based on Cartesian coordinates.
- Trajectory tracking: the vehicle must move through a time-parameterized path. In other words, there is a function that determines the vehicle’s position at any given moment.
Trajectory tracking is the most complex form of autonomous navigation.

Point stabilization
Robots need to approach objects of interest for inspection, repair, and general manipulation tasks. Once there, they must hold their position by resisting movements such as ocean currents, fauna, and other vehicles. This task is another important challenge that must be considered when designing and programming the vehicle. In some cases, one control system is designed for autonomous navigation and another independent control system is designed for point stabilization.
A robust and precise controller
Many control theories have been used to accomplish autonomous navigation and point stabilization tasks, but due to deep-sea conditions, the robot’s complexity, and the difficulties of manual handling tasks, they don’t all perform in an efficient, precise, and robust manner.
What’s more, most of the controllers designed require precise knowledge of the robot in terms of its physical characteristics and hydrodynamics.
It’s very difficult to achieve such precise and in-depth knowledge of a robot, since they’re very complex systems and the way they behave underwater depends on many factors that vary to a large degree.
That’s why a research group from Tecnológico de Monterrey’s Querétaro campus, in collaboration with the Center for Engineering and Industrial Development (CIDESI), have proposed the use of a model-free controller (that does not require knowledge of the robot’s hydrodynamics), which is based on robust control theories and responds quickly and precisely to what is required for the autonomous navigation and point stabilization of underwater vehicles [2–4].
Object recovery
The purpose of developing this control system is to design collaborative manipulation tasks, such as the recovery of underwater objects.
The task currently being worked on consists of two vehicles that navigate autonomously until they reach an object of interest.
Once they are close, they will maintain their position while identifying the object by means of artificial vision, then position themselves to retrieve it through the use of a pincer. Finally, the vehicles navigate in a coordinated manner back to the surface.

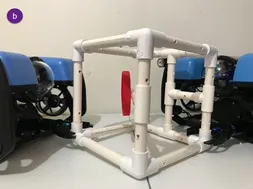
Figure 6: (a) Autonomous identification of underwater objects. (b) Example of collaborative autonomous underwater vehicles grasping an object.
Although the results so far are limited to simulations and controlled experiments, we are getting closer to being able to complete this task and continue to work on applying it to real underwater environments.
Do you want to know more about this research?
1. González-García, J.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Escobedo Cabello, J.A. Autonomous Underwater Vehicles: Localization, Navigation, and Communication for Collaborative Missions. Appl. Sci. 2020, 10, doi:10.3390/app10041256.
2. González-García, J.; Narcizo-Nuci, N.A.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; Cabello, J.A.E. Model-Free High Order Sliding Mode Control with Finite-Time Tracking for Unmanned Underwater Vehicles. Appl. Sci. 2021, 11, 1–22, doi:10.3390/app11041836.
3. González-García, J.; Gómez-Espinosa, A.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Cuan-Urquizo, E.; Cabello, J.A.E. Model-Free High-Order Sliding Mode Controller for Station-Keeping of an Autonomous Underwater Vehicle in Manipulation Task: Simulations and Experimental Validation. Sensors 2022, 22, 4347, doi:10.3390/s22124347.
4. González-García, J.; Gómez-Espinosa, A.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Cuan-Urquizo, E.; Cabello, J.A.E. Experimental Validation of a Model-Free High-Order Sliding Mode Controller with Finite-Time Convergence for Trajectory Tracking of Autonomous Underwater Vehicles. Sensors 2022, 22, doi:10.3390/s22020488.
*About the authors
Josué González García is a Ph.D. student of engineering sciences at Tecnológico de Monterrey’s Querétaro campus.
Alfonso Gómez Espinosa is a research professor at the School of Engineering and Sciences, in the Mechatronics Engineering Department for the Central-South Region.
Tomás Salgado Jiménez is a researcher at the Electrical and Electronic Engineering Department of the Center for Engineering and Industrial Development, Querétaro Site.
Luis Govinda García Valdovinos is a full research professor at the Electrical and Electronic Engineering Department of the Center for Engineering and Industrial Development, Querétaro Site.