
*Por: Josué González García, Alfonso Gómez Espinosa, Tomás Salgado Jiménez, Luis Govinda García Valdovinos
Los vehículos subacuáticos autónomos permiten la realización de muchas tareas normalmente realizadas por personas bajo condiciones de mucho riesgo. Sin embargo, su diseño y construcción es un reto.
Se estima que más del 90% del ambiente subacuático permanece sin ser explorado. La razón es muy sencilla: los humanos no estamos hechos para sobrellevar las condiciones extremas que se presentan en las profundidades.
Sin embargo, existen tareas que deben de llevarse a cabo en estos ambientes, tanto para el ámbito científico como comercial. La inspección de cascos de barco, estructuras y tuberías han sido realizadas tradicionalmente por buzos profesionales.
Los vehículos subacuáticos no tripulados han surgido como una alternativa rápida, menos costosa y segura para la realización de estas actividades. Además, han abierto la posibilidad de explorar ambientes submarinos más profundos para la realización de mapas, estudios oceanográficos, recolección de datos, entre otros, lo que ha permitido expandir el conocimiento de los océanos y de los fondos marinos.
Vehículos subacuáticos autónomos
En sus inicios los robots subacuáticos eran operados por una persona en la superficie, enviando comandos y recibiendo retroalimentación a través de una conexión física conocida como cordón umbilical. Conforme las tecnologías fueron desarrollándose, la capacidad de estos robots de reconocer lo que sucede a sus alrededores y de tomar decisiones en respuesta a ello fue aumentando, dando lugar a los vehículos subacuáticos autónomos.

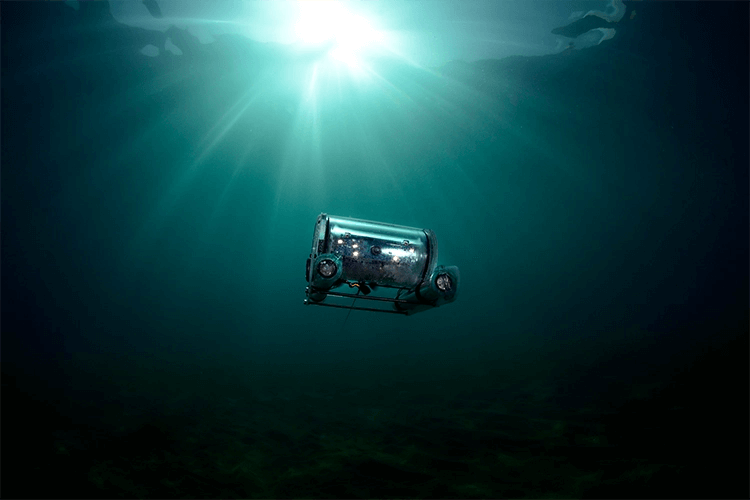
Figura 1: Vehículo subacuático del laboratorio de robótica submarina del Centro de Ingeniería y Desarrollo Industrial
Hasta ahora, la mayoría de las tareas para estos vehículos son de exploración, recolección de datos y mapeo de superficies o estructuras.
En años recientes, ha surgido un enorme interés en el desarrollo de este tipo de vehículos para tareas de inspección, mantenimiento y reparación. En otras palabras, se busca que el robot sea capaz de interactuar con su alrededor y manipular objetos de interés.
Sistemas multirobot
Algunas tareas son demasiado complejas para ser realizadas por un único vehículo, por lo que requieren de la colaboración de múltiples unidades. Así surgen los sistemas multirobot.
Hoy se pueden encontrar diversos ejemplos de tareas de exploración y mapeo colaborativos realizados en ambientes subacuáticos reales. Sin embargo, el avance en tareas colaborativas de manipulación ha sido menor, debido a la complejidad que representan.
Diseño de vehículos subacuáticos autónomos
El diseño, construcción y programación de vehículos subacuáticos autónomos es todo un reto para los ingenieros e investigadores [1]. Además de la complejidad de la tarea misma, el ambiente subacuático supone muchas restricciones y complicaciones que no se encuentran en el diseño y construcción de robots terrestres o aéreos.
El mejor ejemplo de ello es que el uso del sistema de posicionamiento global (GPS) está limitado a la superficie, debido a que el tipo de señales utilizadas por este sistema no se propagan en el agua. Una vez debajo del agua, el robot debe utilizar otros métodos de posicionamiento, como el uso de sistemas acústicos o inerciales, que son más lentos y menos confiables.

Navegación autónoma
Se considera navegación autónoma cuando el vehículo es capaz de moverse desde una posición inicial hacia una posición final, sin intervención alguna de una persona. Este movimiento puede darse de distintas formas [2]:
- Navegación por puntos: el vehículo debe moverse de un punto a otro, sin importar la ruta o el tiempo que le tome.
- Seguimiento de rutas: el vehículo se mueve siguiendo una ruta definida geométricamente a partir de coordenadas cartesianas.
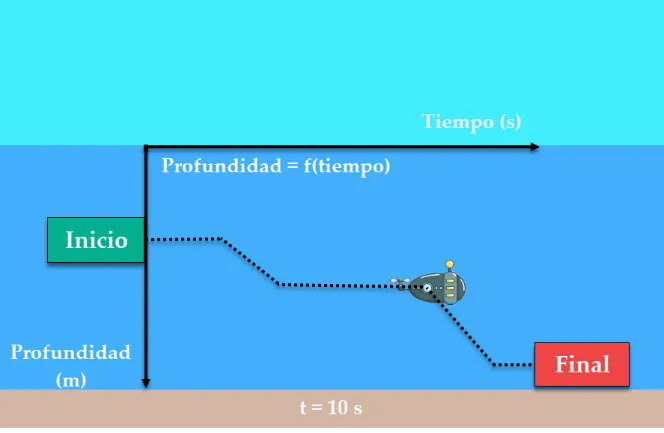
- Seguimiento de trayectorias: el vehículo debe moverse a través de una ruta parametrizada en el tiempo. Es decir, existe una función que determina la posición que debe tener el vehículo en cada instante.
El seguimiento de trayectorias es la forma más compleja de navegación autónoma.
Mantenimiento de posición
En tareas de inspección, reparación y manipulación en general, el robot requiere aproximarse hacia el objeto de interés y, una vez ahí, debe mantener su posición resistiéndose a los movimientos propiciados por corrientes submarinas, fauna, otros vehículos, etcétera. Esta tarea es otro reto importante que debe ser considerado en el diseño y programación del vehículo. En algunas ocasiones, se diseña un sistema de control para la navegación autónoma y un sistema de control independiente para el mantenimiento de la posición.
Un controlador robusto y preciso
Muchas teorías de control se han utilizado para lograr las tareas de navegación autónoma y mantenimiento de posición, pero, debido a las condiciones del ambiente subacuático, la complejidad del robot y las dificultades propias de las tareas de manipulación, no todos se desempeñan de una forma eficaz, precisa y robusta.
Además, la mayoría de los controladores diseñados requieren un conocimiento preciso del robot, en cuanto a sus características físicas e hidrodinámica.
Este conocimiento preciso y profundo del robot es muy complicado de lograr, ya que son sistemas muy complejos y la forma en que se comportan bajo el agua depende de muchos factores, mayormente variantes.
Por ello, un grupo de investigación del Tecnológico de Monterrey, Campus Querétaro, en colaboración con el Centro de Ingeniería y Desarrollo Industrial (CIDESI), han propuesto el uso de un controlador libre de modelo (no requiere un conocimiento de la hidrodinámica del robot), basado en teorías de control robustas y que responde, de forma rápida y precisa, a lo que se le demanda para la navegación autónoma y el mantenimiento de posición de vehículos subacuáticos [2–4].
Recuperación de objetos
El desarrollo de esté sistema de control está pensado para el diseño de tareas colaborativas de manipulación, como la recuperación de objetos que se encuentran bajo el agua.

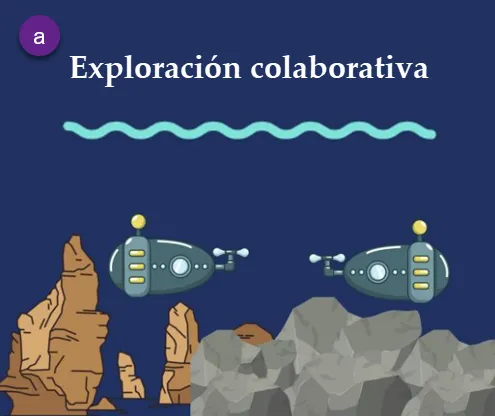
La tarea en que se está trabajando actualmente consiste en dos vehículos que navegan de forma autónoma hasta aproximarse a un objeto de interés.
Una vez cerca, mantienen su posición mientras identifican al objeto por medio de visión artificial, y se colocan en la posición adecuada para tomarlo por medio de una pinza. Finalmente, de forma coordinada, los vehículos navegan de vuelta a la superficie.
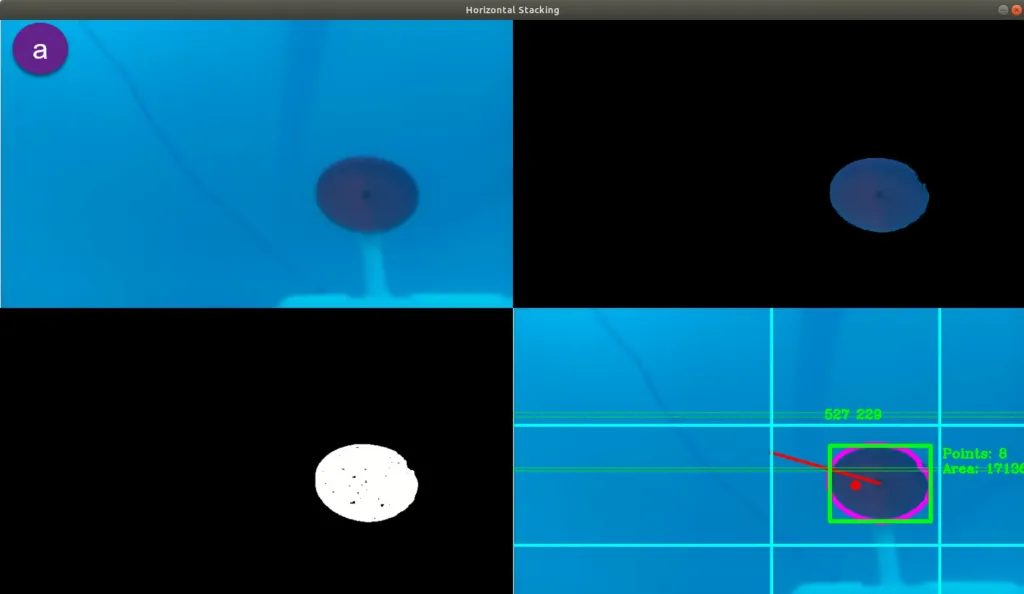

Figura 6: (a) Identificación autónoma de objetos bajo el agua. (b) Representación de la sujeción de un objeto por vehículos subacuáticos autónomos colaborativos.
Si bien hasta ahora los resultados están limitados a simulaciones y experimentos controlados, estamos cada vez más cerca de poder completar esta tarea y continuar el trabajo hasta llegar a ambientes subacuáticos reales.
¿Quieres saber más sobre esta investigación?
1. González-García, J.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Escobedo Cabello, J.A. Autonomous Underwater Vehicles: Localization, Navigation, and Communication for Collaborative Missions. Appl. Sci. 2020, 10, doi:10.3390/app10041256.
2. González-García, J.; Narcizo-Nuci, N.A.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; Cabello, J.A.E. Model-Free High Order Sliding Mode Control with Finite-Time Tracking for Unmanned Underwater Vehicles. Appl. Sci. 2021, 11, 1–22, doi:10.3390/app11041836.
3. González-García, J.; Gómez-Espinosa, A.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Cuan-Urquizo, E.; Cabello, J.A.E. Model-Free High-Order Sliding Mode Controller for Station-Keeping of an Autonomous Underwater Vehicle in Manipulation Task: Simulations and Experimental Validation. Sensors 2022, 22, 4347, doi:10.3390/s22124347.
4. González-García, J.; Gómez-Espinosa, A.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Cuan-Urquizo, E.; Cabello, J.A.E. Experimental Validation of a Model-Free High-Order Sliding Mode Controller with Finite-Time Convergence for Trajectory Tracking of Autonomous Underwater Vehicles. Sensors 2022, 22, doi:10.3390/s22020488.
*Sobre los autores
Josué González García es estudiante de doctorado en ciencias de ingeniería en el Tecnológico de Monterrey campus Querétaro.
Alfonso Gómez Espinosa es profesor-investigador de la Escuela de Ingeniería y Ciencias, en el Depto. de Ingeniería Mecatrónica, Región Centro-Sur.
Tomás Salgado Jiménez es investigador de la Dirección de Ingeniería Eléctrica y Electrónica del Centro de Ingeniería y Desarrollo Industrial, Sede Querétaro.
Luis Govinda García Valdovinos es profesor-investigador titular de la Dirección de Ingeniería Eléctrica y Electrónica del Centro de Ingeniería y Desarrollo Industrial, Sede Querétaro.